


The LEGO Technic Idea Book – Wheeled Wonders.
In previous post, I introduced how to create a crane model by referring to the inspiration idea from the book of Yoshihito Isogawa. Recently, Ray is attracted by his book and this time, he finds another model he is interested.
It is a simple tricycle model and it is even not connected to smart hub or motors, but we are interested in how the model could steer simply through mechanical design. Furthermore, it is the first time Ray tries to build tricycle. So we begin our mission.
Out first model is very simple, as shown below.
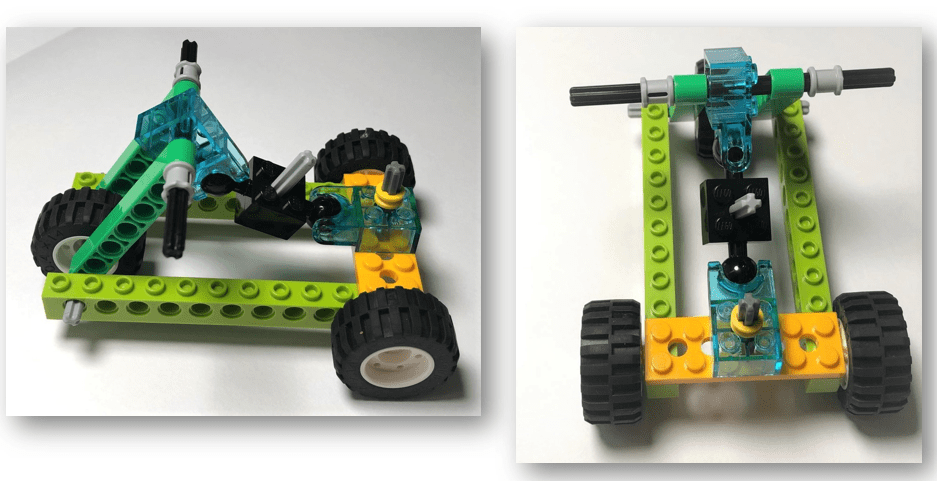
The model is very compact. We simulate the model in the book to build the front wheel, but unfortunately, the green beam has only pin holes. Therefore, it will rotate around the black axis and cannot fix the shape of the front wheel structure. In order to fix the front wheel structure, we pass the grey axis through the hole of the green beam, but in this way, the front wheel could not steer.
In LEGO WEDO 2.0, no matter rounded beam (dark green one) or Technic brick (light green one), they only have pin holes, which make them spin inside an axis and could not form firm structure.
Therefore, we need to find other ways to steer the front wheel. The following is the final model, and take a glimpse first and I will explain in the below sections.

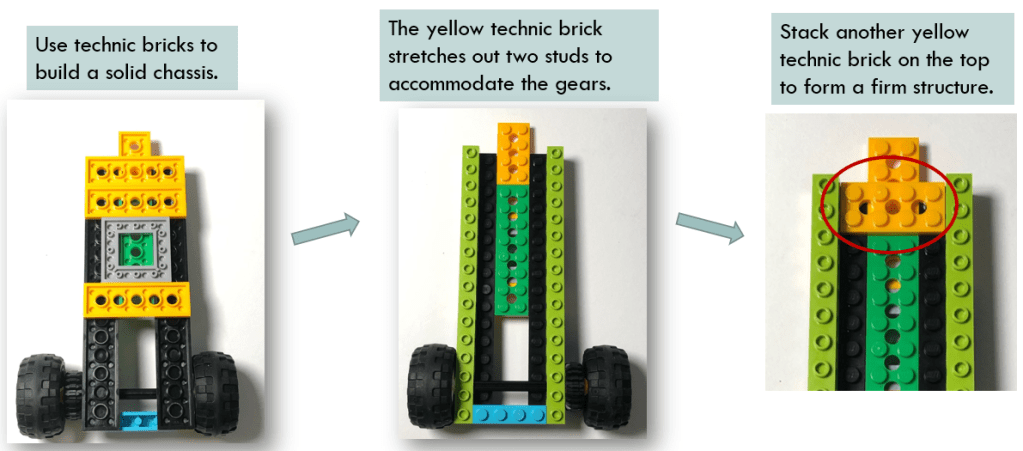
Building the Base of the Vehicle
The base of the vehicle is not difficult. Plan the layout of smart hub and motor and leave enough space for them. Since we need to use bevel gear in the next step, the yellow plate is striking out for amounting the axis of bevel gear.
Build the Front Wheel Structure
Front wheel structure is the most important part of the tricycle. Since LEGO WEDO 2.0 has not angled beam which contains axis hole, we borrowed two white angled beams from LEGO MindStorms EV3 and a perpendicular axis joiner. The three components are external to LEGO WEDO 2.0.
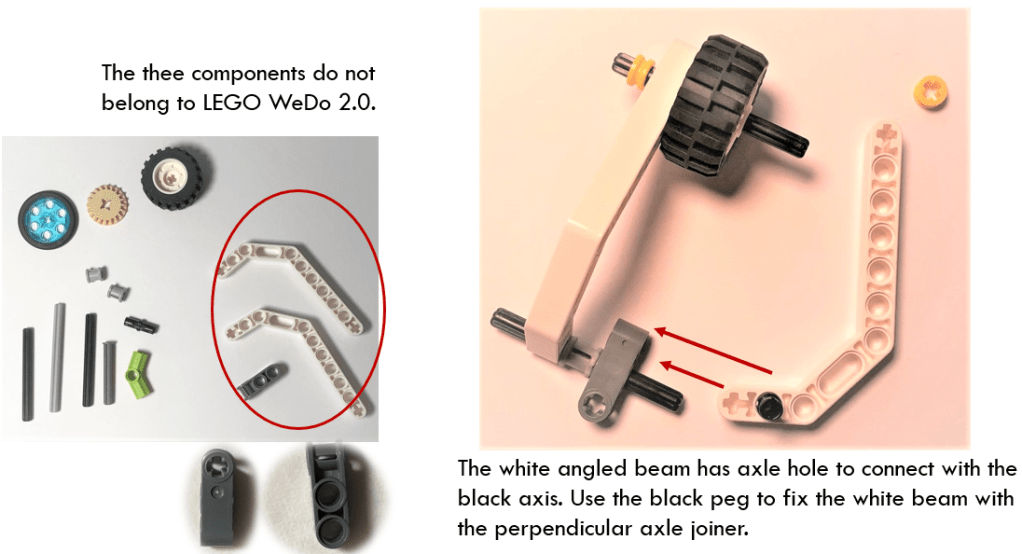
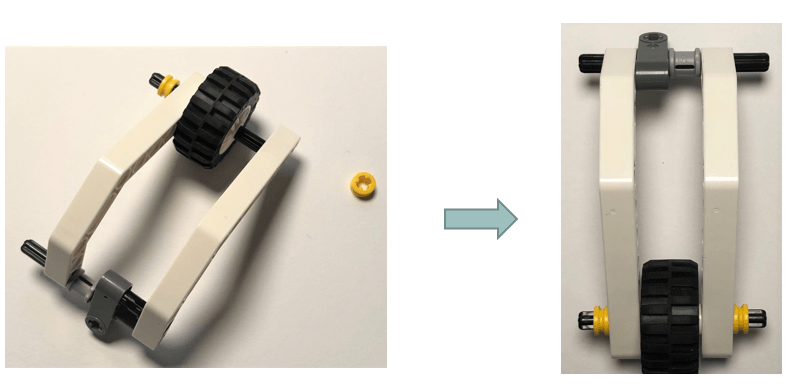
The assembled structure is shown in below diagram. Since the black axis passes through white beam’s axis holes, and perpendicular axle joiner connects with white beam by two points – one is through the black axis, the other is through the black peg, now the whole structure becomes fixed firmly.
The axis hole of the perpendicular axle joiner will connect to the bevel gear’s output axis. Please continue reading the next section.
Build the Steering Structure
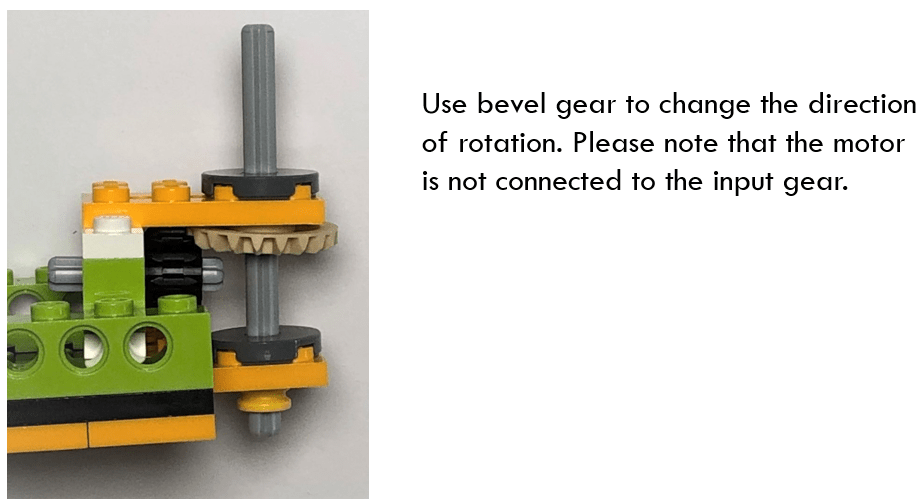
We use a bevel gear to change the drive direction from horizontal to vertical. Please note that in this model, we do not connect any motor to the input gear. The only motor in LEGO WEDO 2.0 will be used to drive the rear wheels forward. If you have another spare model, you could use it to drive the input gear, so the steering could be controlled by program, rather than manually.
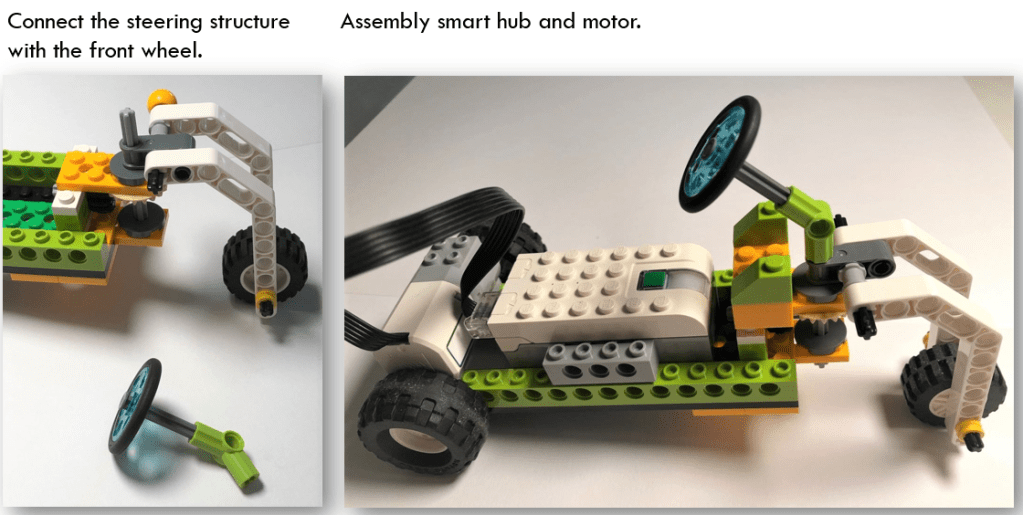
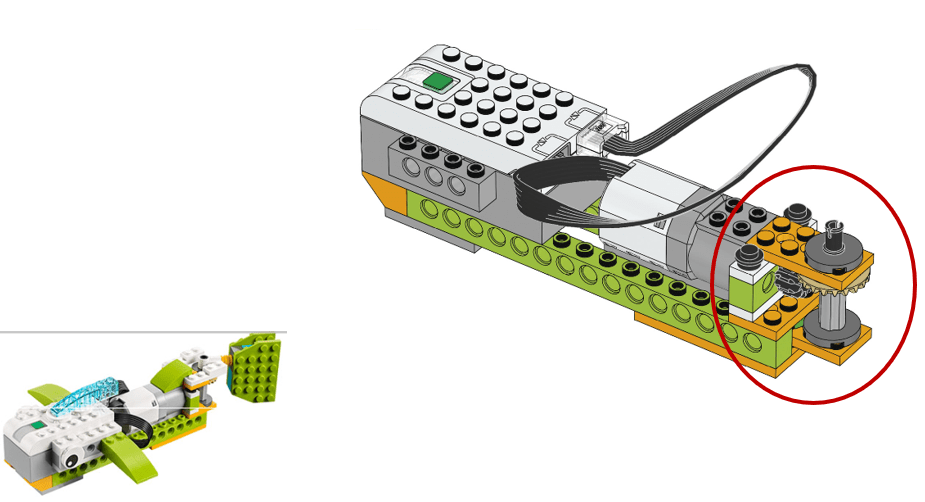
Final Assembly
We now assembly the front wheel structure to the bevel gear’s axis, install the steering wheel, and then put smart hub and motor in the proper position. Please note that the motor uses gears to transfer the drive to the rear heels, which I did not show it up in the picture.
Video – Steering Manually
The current tricycle would be steered manually. Adding another motor, we could steer the vehicle automatically.
Revise What We Have Learned
For the steering part, we could find the similar structure in one of guided project – Flex. So do not under-estimate those guided projects. Next time, if you do not have inspiration, browse those sample projects to ignite your imagination.
Last but not the least, decorate the tricycle. That is also Ray’s favorite part.

Programming is easy, so I will not post the code here. I will publish an upgraded version of using two motors and add more fun to this model. Stay tuned!
Most of all, Enjoy the design and have fun!
Note: All the analysis articles are copyright products of http://www.thecodingfun.com. Anyone re-posting them should credit author and original source. Anyone using them for commercial purposes or translating them into other languages should notify TheCodingFun and get confirmation first. All Rights Reserved.

Pingback: LEGO WeDo 2.0 – Use Bevel Gearbox to Build a Swirling Vehicle – Coding Courses Designed for Kids