

In my previous posts, I analyzed several models used in WRO 2020 and WRO 2019, elementary age groups. Today, I would like to introduce two models for WRO 2018 competition and compare their advantages and disadvantages.
The game description, rules and scoring could be found at WRO website: https://wro-association.org/competition/previous-challenges
Model 1
This model has two big motors to drive the two back wheels. The smart hub is standing, so we could see the overall structure clearly.
A medium motor is mounted on the top to drive a pendulum-like attachment. This structure is attached with two colour sensors. One is LEGO colour sensor, installed on the left side to detect the black line in the field. The other HiTechnic colour sensor is mounted where it could identify the colour of blocks. The advantages of HiTechnic colour sensor have been mentioned in my previous post.
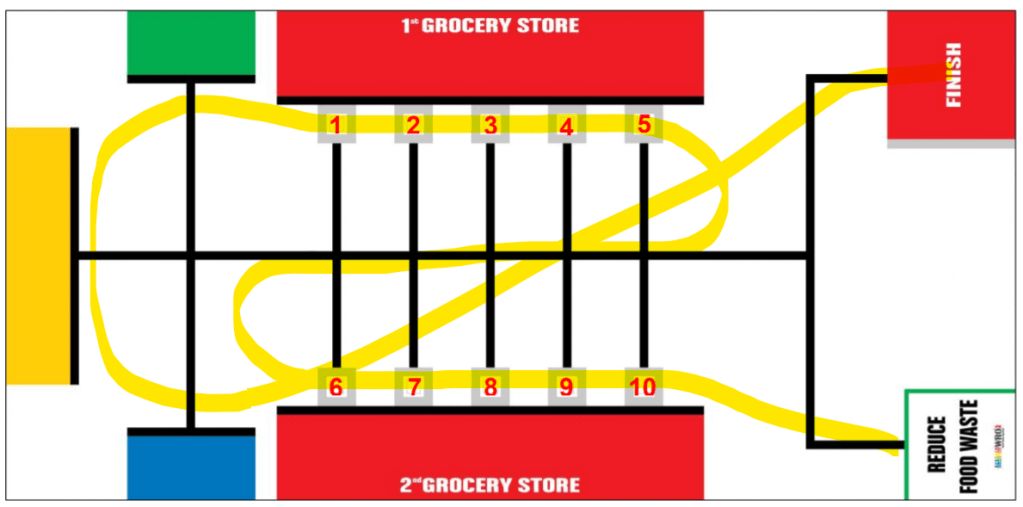
WRO 2018 competition is more like a collection game. The attendees need to think out ways to collect fruits and categorize them efficiently. To improve efficiency, most of models shown on YouTube design one or several collectors to store colour blocks and then carry them with the vehicle to their destination.
This model is unique because it designs three “tunnels” to collect those color blocks. When the vehicle drives along the “Fruit Placement Area” (the initial position of colour blocks), the HiTechnic colour sensor identifies the colour of each block. If the block is red, the pendulum structure will spin fast and “kick” it into the “Grocery Store” (the red area) like a golf club.
Other colour blocks will be “hit” by the pendulum with different angle and strength to shift toward the expected “tunnels”. From the video, we could see that the blue blocks are shifted into the left tunnel, the yellow blocks are into the middle tunnel and green ones are in the right tunnel. When the vehicle passes through the “Fruit Placement Area” once, it scans and categorizes all the colour blocks.
The next step the robot does is to send other colour blocks into their target area. The implementation is efficient. Since the vehicle has put colour blocks in different channels, each time it drives straight into an area, the front pendulum structure will swing off a bit, so that pendulum structure as an obstacle is removed from the exit of one tunnel. When the vehicle retrieves, the blocks in that tunnel will be left in the target area.
In summary, this model is featured with its versatile front attachment. It could hit the red block into its destination, shift other color blocks into predefined tunnels and act as a barrier when colour blocks in a tunnel should stay inside.
Model 2
The front attachment of this model is similar to that of model 1, but much simpler. It has one beam connecting to the medium motor. When the beam spins from the highest point to the lowest point, it hits the colour block to its target area like a golf club.
The model contains three colour sensors to guide it run along the black line. This arrangement indicates that the model depends more on the black lines for its positioning, less on distance or turning angle estimation. It increases the running reliability, but on the other side, makes the vehicle less flexible in planning its route.
The 4th colour sensor is tilted installed, facing the color block to identify its colour.
It seems that the typical way of accomplishing WRO 2018 mission is to design a collector. This one is no exception. However, different from the 1st model, this one has one tunnel to collect all those colour blocks except red ones. Since yellow, blue and green blocks are mixed together, the vehicle needs to identify each block again before “kicking” them to their target zone, which consumes extra time.
Meanwhile, since its route planning depends more on black lines, when the vehicle stops in the center black line to “kick” the blue and green blocks, the distance to the target zone is a bit farther than what the pendulum structure could hit to. Both blue and green colour blocks fail to enter into the target zone, losing some points.
Comparison
In my opinion, separating the different colour blocks into different tunnels requires accurate calculation on the spin speed and angle of the front attachment, which could be done through trial and error. It brings much convenience for the latter tasks of distributing yellow, green and blue color blocks, as shown in Model 1.
For Model 2, storing all the colour blocks in one tunnel seems simplifying the design of the model, but it adds extra workload when trying to move the other color blocks to the destination. The other problem for this model is that it relies too much on the black lines. If the program could be updated to redesign the route as shown below, the robot might perform better.
Note: All the analysis articles are copyright products of http://www.thecodingfun.com. Anyone re-posting them should credit author and original source. Anyone using them for commercial purposes or translating them into other languages should notify TheCodingFun and get confirmation first. All Rights Reserved.

You must be logged in to post a comment.