

Virtual Robotics Toolkit (VAT) was developed by Cogmation Robotics. It develops simulation software that enables users to control robotics systems. You might ask why you should use a virtual robotics environment when you have a real EV3 robot at hand for playing, but there are situations where your robot is placed somewhere else (for example, in school or in robotics club). You might be practicing EV3 programming but lack of suitable maps. You might also want to discuss online with your teammates on the EV3 program for the upcoming robot competition. For all those scenarios, VAT could overcome the constraints of physical environment and extend your training field beyond the robot club.
Recently, we are trying to integrate this software into our robotics lessons, so why not follow us to have some initial experience right now.
Multiple Map Choices
What attracts me most is the multiple choices of different maps. You could choose recent competition maps from First LEGO League or WRO categories, which are suitable for advanced users. You could also choose maps from Sim Basics category, which provides practicing maps for beginners and intermediate users. As a coach, you could also customize your own maps through designing the picture in other image editors and then importing them into VAT.
As to how to customize maps in VAT, the company offers a live stream, which you could access on YouTube. If you are interested, free free to take a look.

If you just want to use existing maps provided by the software, it is easy to go. For example, choose WRO category and select “Sustainable Tourism”, you could open the competition map of WRO 2017 Elementary Age Group, as shown below. A robot model has been loaded into the project automatically. What you need to do is just to write the program in LEGO Programming Software, and then test the code in this simulated environment.
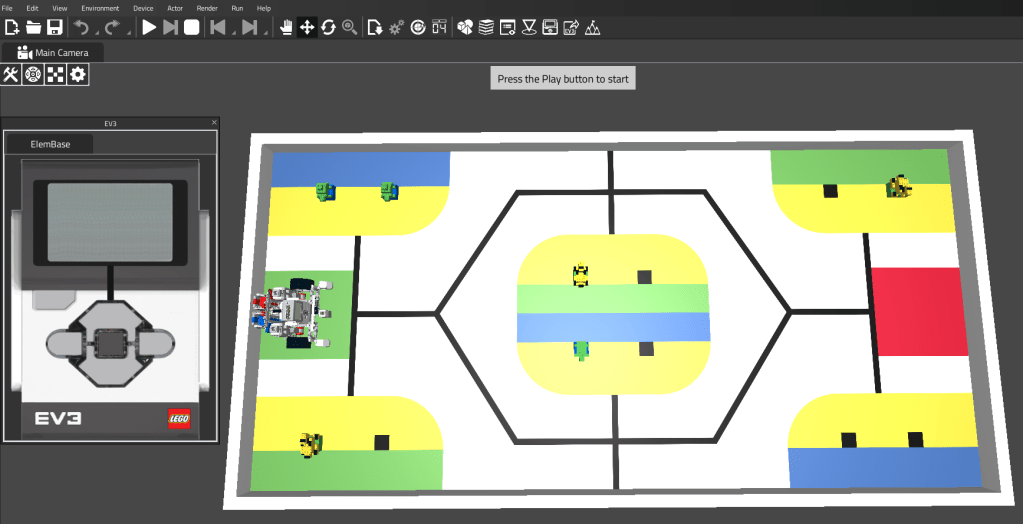
In the next post, I will present an example to show how to write a program in LEGO Programming software and test it in VAT. While in this post, I would like to discuss two issues of the software which might influence user experience.
Font Size
As you could see from the above image, the user interface font is super small. The font size is just like 7 or 8, which I could barely recognize. I installed the software on both Windows 10 and Mac operation systems, and the problem exists on both of them. Even if I switched to a bigger screen like 27″ or 32″, the font is a little bit bigger but not clear, either.
This problem might be related to the auto scaling of text and image on high resolution screen. I tried several methods introduced by some web posts, but they could not fix this problem.
Staring at screen to identify those mini letters strains my eyes quickly. This is an issue affecting many users. I have sent an email to the support team of VAT, hoping I could get feedback to solve this problem soon.
Configuration Takes Time
It takes some time to get familiar with this software and configure your project properly. Fortunately, there are a series of short videos on YouTube posted by the company, guiding on how to get started on this software. I would say this is the most convenient way for beginners to ramp up the learning curve.
Some advanced topics, such as setting scoreboard, setting environmental parameters, adding actors or setting trigger, need more time to understand their effect on the simulation.
The general process for configuring the VAT environment and running the robot could be summarized in the below steps.
Step 1. New/Open a project. You could create a new project by choosing a project template, or you could open a previously saved project.
Step 2. Import a robot model. If you just use the sample project offered by the software, this step could be skipped, because the sample project has contained a default robot model. You could also choose other robot models.
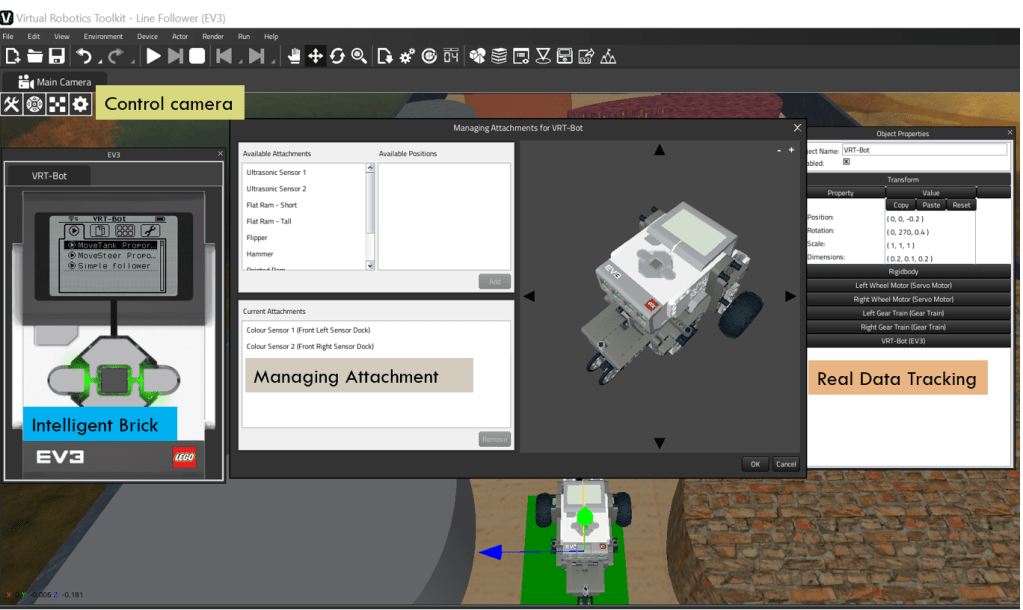
Step 3. Select the robot model and choose “Attachments” tab item. Add sensors and specify their mounting positions.
Step 4: Check connection port index of sensors and motors. When writing program in LEGO programming software, you should ensure the port index consistent to make the program run.
Step 5: Click “Intelligent Brick” tab item and then click the center button of the virtual brick to turn it on.
Step 6. Open LEGO programming software and connect it with the virtual robot model.
Step 7: Save your VAT project, so next time, you do not need to repeat the above steps. All the project settings are kept.
Done! That is the steps needed to properly configure a VAT project. A bit cumbersome, right? But don’t go away, real work has not started, yet.
Program Designing and Debugging
Now, you could write your program in LEGO programming software. If you want to check how the robot runs the program, click download button in LEGO Programming software.
The next step, in VRT, find the downloaded program from the virtual brick and run the program. Check how your robot behaves on the map.
Repeat above two steps to develop and debug your program till you are satisfied.
For beginners of the software, the first step is to configure the project properly. If the software could wrap the configuration up in a wizard, it would be more user friendly. In the next post, I will demonstrate how to use VAT to debug a line following program. Stay tuned, enjoy coding and have fun!
Note: All the analysis articles are copyright products of http://www.thecodingfun.com. Anyone re-posting them should credit author and original source. Anyone using them for commercial purposes or translating them into other languages should notify TheCodingFun and get confirmation first. All Rights Reserved.

Pingback: LEGO MindStorms EV3 – Use Virtual Robotics Toolkit (VAT) to Practice Line Following – The Coding Fun